يمكن للآلات القادرة على التزاوج وإنتاج آلات أخرى مماثلة لها أن تساعدنا على تنظيف المواقع النووية واستكشاف الكويكبات وتحويل كواكب بعيدة إلى كواكب شبيه بالأرض- ولكن هل يمكن أن تشكل تهديداً؟ إنه سؤال تطرحه إيما هارت التي تساعد على تطويرها.
على امتداد قرن، قطعت الروبوتات شوطاً طويلاً منذ أن استخدم الكاتب التشيكي كاريل شابك Karel Čapek الكلمة لوصف آلات اصطناعية ذاتية التشغيل.
فبعد أن كانت محصورة إلى حد كبير في المصانع، نجدها الآن في كل مكان من المجال العسكري والطب إلى التعليم وعمليات الإنقاذ تحت الأرض. فقد ابتُكرت روبوتات يمكنها صنع أعمال فنية وزراعة الأشجار وركوب ألواح التزلج واستكشاف أعماق المحيط. إذ يبدو أنه لا حدود لتنوع المهام التي يمكننا تصميم آلة للقيام بها.
ولكن ماذا لو كنا لا نعرف بالضبط ما هي القدرات التي يحتاج إلى أن يمتلكها الروبوت الذي نطوره؟ قد نرغب، على سبيل المثال، في إرساله لتنظيف موقع شهد حادثاً نووياً وإرسال بشر إليه غير آمن، أو استكشاف كويكب ليست لدينا معلومات عنه أو تحويل كوكب بعيد إلى كوكب شبيه بالأرض. يمكننا ببساطة تصميمه لمواجهة أي تحديات نعتقد أنها قد تعترضه ونتمنى أن تسير الأمور على ما يرام. ومع ذلك، هناك بديل أفضل: التعلم من التطور وصنع روبوتات يمكنها التكيف مع بيئتها. يبدو الأمر بعيد المنال، لكن هذا بالضبط ما أعمل عليه مع زملائي ضمن مشروع يسمى التطور الذاتي للروبوتات Autonomous Robot Evolution (اختصاراً: المشروع ARE).
لم نصل إلى ذلك بعد، لكننا ابتكرنا روبوتات يمكنها أن «تتزاوج» و«تتكاثر» لإنشاء تصاميم جديدة تُبنى على نحو مستقل. ليس هذا فحسب، فباستخدام الآليات التطورية للتنوع وبقاء الأصلح عبر الأجيال، يمكن لهذه الروبوتات تحسين تصميمها نحو الأفضل. وإذا نجح الأمر، فستكون هذه طريقة لإنتاج روبوتات يمكنها التكيف مع البيئات الصعبة والديناميكية من دون إشراف مباشر من البشر. إنه مشروع ذو إمكانات هائلة ولكنه لا يخلو من التحديات الكبيرة والتبعات الأخلاقية.
يمكن إرجاع فكرة استخدام المبادئ التطورية لتصميم الأشياء إلى أوائل ستينات القرن العشرين وأصول الحوسبة التطورية Evolutionary computation، عندما ابتكرت مجموعة من طلبة الهندسة الألمان «استراتيجية التطور» الأولى. أنتجت خوارزميتهم الجديدة مجموعة من التصاميم اختاروا مجموعة منها منحازة نحو التصاميم عالية الأداء للبناء عليها في التصاميم التكرارية اللاحقة. وعند تطبيقه على مشكلة هندسية في العالم الحقيقي، لم يؤدِ ذلك إلى تحسين تصميم فوهة فحسب، بل أدى أيضاً إلى إنشاء منتج نهائي كان غير بديهي لدرجة يمكن معها وصف العملية بأنها إبداعية – وهذه إحدى أثمن خصائص التطور البيولوجي.
منذ ذلك الحين، حصل تغيير كبير في قدرتنا على تطبيق التطور الاصطناعي Artificial evolution من أجل تصميم الأشياء. فالزيادة الهائلة في القوة الحاسوبية تسمح للحواسيب بالمرور عبر أجيال من التصاميم في وقت قصير وتتيح إنشاء عمليات محاكاة عالية الدقة لبيئات حقيقية لاختبارها. في غضون ذلك، أدى التقدم في نظرية التحسيب التطوري إلى التوصل إلى طرق أفضل لتمثيل المعلومات التي تُبنى منها التصاميم – حمضها النووي DNA الافتراضي – ومعالجة ذلك عند توليد «النسل» بحيث يعكس العمليات الموجودة في الطبيعة. وتشمل هذه الطفرات وإعادة تركيب الحمض النووي DNA، مما يخلق تنوعاً جينياً من خلال تفكيك سلاسل الحمض النووي DNA وإعادة تجميعها بطرق جديدة. تتراوح أمثلة التصميم التطوري في الممارسة حالياً من الجداول إلى جزيئات جديدة ذات وظائف مرغوب فيها. منذ عام 2006 أرسلت وكالة الفضاء الأمريكية (ناسا) قمراً اصطناعياً إلى الفضاء مع هوائي اتصال أنشئ عن طريق التطور الاصطناعي.
ومع ذلك، فإن تصميم الروبوتات يضيف بعداً جديداً ممتلئاً بالتحديات إلى المجال: فهي تتطلب، إضافة إلى الأجسام، أدمغة لتفسير المعلومات المستقاة من بيئاتها وترجمة ذلك إلى سلوك مرغوب فيه. فقد عالج الكثير من الأعمال المبكرة على الروبوتات التطورية هذه المشكلة ببساطة عن طريق تكييف دماغ مع تصميم الجسم حديث التطوير. لكن الذكاء ليس مجرد خاصية للدماغ فهو موجود كذلك في الجسد. وفي القرن الحادي والعشرين، حدث تحول لتطوير كل من جسم الروبوت ودماغه في وقت واحد. وعلى الرغم من أن هذا يعقد العملية التطورية، فإن له عائداً كبيراً: نقل بعض الذكاء إلى الجسم قد يقلل مستوى التعقيد المطلوب في الدماغ.
في عام 2000 استخدم هود ليبسون Hod Lipson وجوردان بولاك Jordan Pollack من جامعة برانديز Brandies University في ماساتشوستس هذا النهج لتطوير روبوتات صغيرة قادرة على التحرك إلى الأمام بُنيت ذاتياً باستخدام تقنيات التجميع الآلي. منذ ذلك الحين، أدت التطورات السريعة في المواد والمحاكاة وأساليب الطباعة ثلاثية الأبعاد إلى زيادة كبيرة في نطاق تصميمات الروبوتات. بعد عقد من الزمن، استخدم ليبسون وجوناثان هيلر Jonathan Hiller، وكلاهما من جامعة كورنيل Cornell University في نيويورك، المبادئ نفسها لتطوير «روبوتات لينة» Soft robots ذاتية البناء، وهي آلات مصنوعة من مواد مرنة بدلاً من المواد الصلبة. سجل المجال معلماً آخر في عام 2020 عندما استخدم جوش بونغارد Josh Bongard من جامعة فيرمونت University of Vermont وزملاؤه طريقة مماثلة لتصميم روبوتات حية، أو ما اصطلح على تسميتها زينوبوتس Xenobots، مصنوعة من خلايا الضفادع.
على الرغم من أن كلاً من هذه الأمثلة يمثل معلماً مهماً في مجال في الروبوتات التطورية، فإن لديها جميعها عيبين. أولاً، لا يحتوي أي من هذه الروبوتات على أجهزة استشعار، لذلك على الرغم من قدرتها على الحركة الموجهة، فإنها تفتقر إلى القدرة على الحصول على المعلومات من بيئتها واستخدامها لتكييف سلوكها. ثانياً، تُطور الروبوتات في المحاكاة ثم تُصنع بعد التطوير. ويترك هذا «فجوة مع الواقع» Reality gap، وهي ظاهرة معروفة في مجال الروبوتات تنتج من اختلافات حتمية بين المحاكاة والواقع. بمعنى آخر، بغض النظر عن دقة المحاكي، يختلف سلوك الروبوتات الفعلية عن سلوك نظيراتها في المحاكاة.
هناك طريقة واضحة للتغلب على العيب الثاني وهي تخطي مرحلة المحاكاة وبناء تصاميم جديدة متطورة وتقييمها مباشرة في الأجهزة. وعرض ذلك لأول مرة باحثون من جامعة ETH Zurich السويسرية، في عام 2015. استخدموا ما أسموه «الروبوت الأم» Mother robot المجهز بخوارزمية تطورية لتصميم نسل من الروبوتات ذاتيا. وبعد ذلك أخضعت روبوتات الجيل الثاني للاختبار واختيرت من بينها تلك التي حققت أفضل النتائج كتصاميم لإدخالها إلى الجيل التالي. ففي عام 2016 وصف غوستي إيبن Guszti Eiben من جامعة أمستردام الحرة Free University Amsterdam بهولندا وفريقه نهجاً مختلفاً. فقد استخدموا روبوتات مبرمجة وفق قواعد تسمح لها «بالالتقاء والتزاوج» Meet and mate، مما أدى إلى بدء عملية إنتاج لإنشاء «طفل روبوت» Robot baby.
مثلث الحياة
مهدت هذه التطورات للمشروع ARE، وهو مشروع يتصور نظاماً مستقلاً بالكامل يمكن من خلاله تصنيع روبوتات مجهزة بأجهزة استشعار تتكيف وتتطور في العالم الحقيقي. وفي عام 2018 أطلق المشروع بتمويل من مجلس أبحاث الهندسة والعلوم الفيزيائية Engineering and Physical Sciences Research Council في المملكة المتحدة، وهو عبارة عن مشروع تعاوني بين جامعة إدنبرة نابير Edinburgh Napier University – حيث أقود مجموعة الأنظمة الذكية المستوحاة من الطبيعة Nature-Inspired Intelligent Systems التي تطور خوارزميات تستند إلى التطور البيولوجي لاكتشاف حلول جديدة للمشكلات الصعبة – وجامعة يورك University of York، وجامعة غرب إنجلترا University of the West of England في بريستول، وجامعة سندرلاند University of Sunderland، وجامعة أمستردام الحرة.
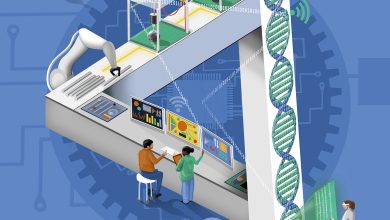
في المشروع ARE، نستخدم رمزاً جينياً اصطناعياً لتحديد جسم ودماغ الروبوت. يحدث التطور في منشأة يطلق عليها اسم EvoSphere من خلال وضع كل روبوت في دورة من ثلاث مراحل – هي التصنيع والتعلم والاختبار – نطلق عليها اسم «مثلث الحياة» The triangle of life. في المرحلة الأولى، تُبنى تصاميم جديدة متطورة على نحو مستقل. تقوم الطابعة ثلاثية الأبعاد في البداية بإنشاء هيكل بلاستيكي. بعد ذلك، تختار ذراع تجميع آلية المستشعرات المحددة ووسائل الحركة من مجموعة من المكونات مسبقة الصنع وتوصلها به. أخيراً، يُضاف حاسوب Raspberry Pi إلى الهيكل ليعمل بمثابة دماغ له. يوصل الدماغ بأجهزة الاستشعار والمحركات، وتُنزَّل فيه برمجية تمثل الدماغ المتطور.
حاسوب Raspberry Pi الذي يعمل مثل الدماغ، متصل بأجهزة الاستشعار والمحركات
تلي ذلك مرحلة التعلم بالغة الأهمية. في معظم أنواع الحيوانات، يخضع الصغار حديثو الولادة لنوع من التعلم لضبط تحكمهم الحركي. وهذا الأمر أكثر أهمية بالنسبة إلى روبوتاتنا لأن التكاثر يمكن أن يحدث بين «أنواع» مختلفة. وعلى سبيل المثال، قد يتكاثر روبوت ذو عجلات مع آخر له أرجل مفصلية، مما ينتج منه روبوت يتحلى بكلا النوعين من الحركة. في مثل هذه الحالات، من غير المرجح أن يوفر الدماغ الموروث تحكماً جيداً في الجسم الجديد. تشغِّل مرحلة التعلم خوارزمية لتحسين الدماغ عبر عدد صغير من التجارب في بيئة مبسطة. وهذه العملية مماثلة لتعلم طفل مهارات جديدة في روضة الأطفال. ولا تنتقل سوى الروبوتات التي تُعد قابلة للاستمرار إلى المرحلة الثالثة؛ وهي مرحلة الاختبار.
في الوقت الحالي، نستخدم نموذجاً بالحجم الطبيعي لداخل مفاعل نووي للاختبار، حيث يتعين على الروبوت إزالة نفايات مشعة. وهذا يتطلب منه تجنب عقبات مختلفة والتعرف على النفايات بشكل صحيح. يحصل كل روبوت على درجات تقييم وفقاً لنجاحه، وتُدخل هذه النتائج إلى الحاسوب. وتستخدم عملية اختيار هذه الدرجات لتحديد الروبوتات التي سيُسمح لها بالتكاثر. بعد ذلك، تُجري برمجية تحاكي التكاثر عمليات إعادة تركيب الحمض النووي والطفرات على المخططات الجينية لروبوتين أبوين لإنشاء روبوت جديد للتصنيع، وإكمال مثلث الحياة. يمكن أن تظل الروبوتات الآباء ضمن المجموعة بحيث يمكنها المشاركة في عمليات تكاثر أخرى، أو تُفكك إلى أجزاء ويُعاد تدويرها لصنع روبوتات جديدة.
من خلال العمل مع روبوتات حقيقية بدلاً من المحاكاة، نقضي على أي فجوة في الواقع. ومع ذلك، فإن طباعة وتجميع كل آلة جديدة يستغرقان نحو أربع ساعات، اعتماداً على مدى تعقيد هيكلها، ومن ثم فهي تحد من سرعة تطور مجموعة الروبوتات. لمعالجة هذا العيب، ندرس أيضاً التطور في عالم افتراضي موازٍ. ويستلزم ذلك إنشاء نسخة رقمية لكل طفل روبوت في جهاز محاكاة بمجرد حدوث التزاوج، ثم تدريبه واختباره في رياض أطفال ومواقع اختبار افتراضية. على الرغم من أنه من غير المحتمل أن تمثل هذه البيئات بدقة تامة نظيراتها في العالم الحقيقي، فإنها تسمح لنا ببناء واختبار تصاميم جديدة في غضون ثوانٍ وتحديد تلك التي تبدو واعدة بشكل خاص. وبعد ذلك يمكن إعطاء الأولوية لجينوماتها والبناء عليها لصنع روبوتات في العالم الحقيقي. وإضافة إلى ذلك، لدينا عملية تفريخ جديدة تسمح بالتكاثر بين روبوت فعلي وأحد أبناء عمومته الافتراضيين مما يسمح بانتشار السمات المفيدة المكتشفة في المحاكاة بسرعة ضمن مجموعة روبوتات العالم الحقيقي حيث يمكن إدخال مزيد من التنقيح عليها.
من حيث المبدأ، يمكن للنظام الذي نطوره أن يعمل بشكل مستقل تماماً في بيئة لا يمكن الوصول إليها أو في مكان بعيد. فالفرص المحتملة رائعة، لكننا نواجه أيضاً خطر أن تخرج الأمور عن نطاق السيطرة وأن تنشأ روبوتات ذات سلوكيات غير مرغوب بها يمكن أن تسبب الضرر أو حتى أن تؤذي البشر. نحن بحاجة إلى التفكير في هذا الآن، في حين ما زالت التكنولوجيا قيد التطوير. ويمثل الحد من توفر المواد التي يمكن من خلالها تصنيع روبوتات جديدة أحد الإجراءات الوقائية. يمكننا أيضاً توقع السلوكيات غير المرغوب فيها من خلال المراقبة المستمرة للعملية التطورية والروبوتات المتطورة، ثم استخدام تلك المعلومات لبناء نمذجيات تحليلية للتنبؤ بالمشكلات المستقبلية. في النهاية، نحتاج إلى امتلاك القدرة على إيقاف العملية برمتها. الحل الأكثر بداهة وفعالية هو استخدام نظام إعادة إنتاج مركزي مع مشرف بشري لديه مفتاح إغلاق النظام.
قد تبدو بعض تطبيقات المشروع ARE، مثل تحويل عوالم جديدة إلى ما يشبه الأرض، تنتمي إلى مستقبل بعيد تماماً، لكن بحثنا يمكن أن يجلب أيضاً المزيد من الفوائد الفورية. فمع تزايد وتيرة تغير المناخ، من الواضح أن مصممي الروبوتات بحاجة إلى إعادة التفكير جذرياً في نهجهم لتقليل بصمتها البيئية. فقد يرغبون، على سبيل المثال، في إنشاء أنواع جديدة من الروبوتات المصنوعة من مواد مستدامة وتعمل بمستويات طاقة منخفضة ويمكن إصلاحها وإعادة تدويرها بسهولة. من المحتمل ألا تشبه هذه الروبوتات على الإطلاق الروبوتات التي نراها من حولنا حالياً، ولكن هذا هو بالضبط السبب الذي يجعل التطور الاصطناعي مفيداً. فنظراً لعدم تقيده بالقيود التي يفرضها فهمنا لعلوم الهندسة على تصاميمنا، يمكن للتطور أن يولد حلولاً إبداعية نعجز حتى عن تخيلها.
بقلم: إيما هارت
ترجمة: صفاء كنج
© 2022, New Scientist, Distributed by Tribune Content Agency LLC